Newsletter
Subscribe to one or more news updates by entering your e-mail address.
TCS and ESP testing
25.02.2015
We tested TCS (Traction Control System) and ESP (Electronic Stability Program) systems on Electric TWINGO SPORT.
First we tested the influence of advanced safety control systems on driving under normal conditions. Test consists on driving straight with gas pedal pressed to maximum on dry asphalt surface.
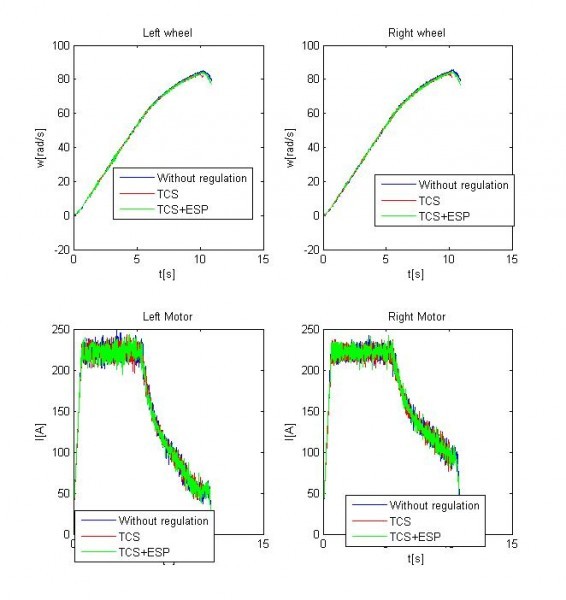
Figure 1 shows responses of rotational velocities of rear wheels and currents of its motors. All responses are identical which proves that proposed algorithms do not reduce system characteristics at all.
Next we tested TCS system on garvel surface. Testing were done by driving straight with gas pedal pressed to the maximum.
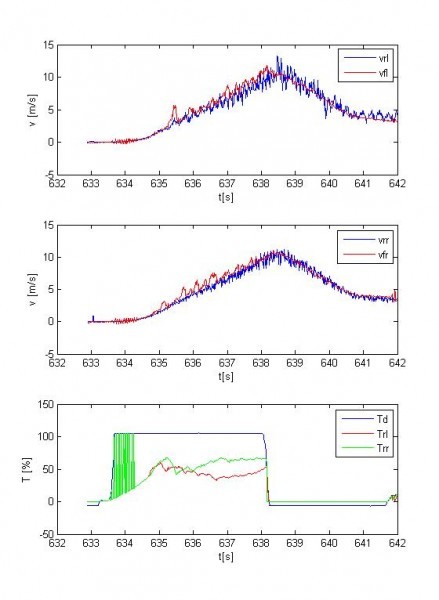
Figure 2 shows that because of too large torque set by the driver pressing the gas pedal, TCS reduces torque to the motors such that the velocity of each wheel follow the velocity of the car. Responses of torques set by TCS show that each motor has different torque, which is the consequence of slightly different surface under each wheel.
Next cornering tests were conducted on gravel surface while turning 90 degrees.
Responses on Figure 3 show that without regulation car oversteers which can be observed by looking at yaw rate and velocity responses which shows that velocity reduces to zero, but yaw rate still holds high value.
Responses with TCS and ESP shows that car does not oversteer and that car safely goes through the corner with greater velocity than without regulation.
For more detail please look at the cornering video!
Do you need torque vectoring control for your electric powertrain?
Contact us for more info on info@exor-evs.com!


Partners
 |